空中風力エネルギー
 |
空中風力エネルギー(AWE )は、空気力学的または静圧的な揚力装置を用いて風力エネルギーを直接利用または生成する技術です。AWE技術は、タワーに設置されたローターを使用する 風力タービンとは異なり、高高度の風を捕集することができます。
高高度風力発電(HAWP)という用語は、AWEシステムを指すために使用されてきました。[ 1 ]しかし、意味的にはHAWPには、地面または海面からかなり高い位置に配置された風力エネルギー変換システムも含まれる可能性があります。
風の運動エネルギーを捕捉するための様々なメカニズムが提案されており、凧、カイトーン、軽飛行機、グライダー、再生滑空用のタービン付きグライダー[ 2 ]、タービン付きグライダー、または複数地点の建物または地形対応の保持を含む他の翼型[ 3 ]などがあります。風の運動エネルギーから機械的エネルギーが生成されると、その機械的エネルギーを使用するための多くのオプションがあります。直接牽引、[ 4 ] [ 5 ]上空または地上局での電力への変換、他の航空機または地上受信機への電力ビーム用のレーザーまたはマイクロ波への変換。高高度システムによって生成されたエネルギーは、上空で使用したり、導線、テザーを介した機械力、無限ループラインの回転、変化した化学物質の移動、高圧ガスの流れ、低圧ガスの流れ、またはレーザーまたはマイクロ波電力ビームによって地表に送信したりできます。
電力利用のための高高度風力
高度が高いほど、風は安定し、持続的になり、風速も速くなります。風力エネルギーは速度の3乗に比例して増加するため(速度の3乗則)、[ 6 ] [ 7 ]、他のパラメータが同じであれば、風速が2倍になると2 3 =8倍のエネルギーが得られ、風速が3倍になると3 3 =27倍のエネルギーが得られます。風がより安定し、予測しやすいため、高高度の風は地表近くの風よりも有利です。HAWPを有効高度に当てはめ、空域の垂直方向を風力発電に利用できることで、高高度の風を利用した発電にはさらなる利点がもたらされます。
高高度風力発電機は、高さと位置を調整してエネルギー回収を最大化できますが、これは固定されたタワーに取り付けられた風力発電機では非現実的です。
それぞれの高度範囲において、研究者や開発者は高度特有の懸念事項に対処しています。高度が上昇するにつれて、テザーの長さが長くなり、気温が変化し、大気雷に対する脆弱性が変わります。高度が上昇するにつれて、責任の所在が増大し、コストが増加し、乱気流への曝露が変化し、システムが複数の風向の層を飛行する可能性が高まり、運用コストも変化します。飛行するHAWPシステムは、最終的な運用高度に至るまで、すべての中間高度を上昇しなければなりません。つまり、最初は低高度用装置であり、その後は高高度用装置となるのです。
地球上のすべての地点における高高度風力発電資源の地図帳が作成されている。 [ 8 ]同様の地球規模の評価地図帳[ 9 ]がJoby Energyで開発された。
高高度の風の運動エネルギーを捕捉する方法
風からエネルギーを取り出す方法としては、凧、[ 10 ]カイトゥーン、係留グライダー、[ 11 ]係留グライダー、エアロスタット(球形および成形カイトゥーン)、ブレードタービン、エアフォイル、エアフォイルマトリックス、ドローグ、可変ドローグ、スパイラルエアフォイル、ダリウスタービン、マグナス効果垂直軸風車、マルチローター複合体、ファブリックジャルベールパラフォイル凧、ユニブレードタービン、フリップウィング、テザー、ブライドル、ストリングループ、漂流ブレード、波状フォーム、圧電材料、[ 12 ]などがあります。[ 13 ]
船舶の推進を目的とした計画の場合、[ 14 ] [ 15 ]、風に係留された物体は、捕捉されたエネルギーの大部分が主係留索に有効な張力で保持される傾向があります。上空の作業体は、船舶が航行中でも有効な張力を維持するように作動します。これはパワーカイトスポーツの方法です。HAWPのこの分野は最も普及している方法です。伝説によると、ベンジャミン・フランクリンはHAWPの牽引法を用いていたと言われています。ジョージ・ポコックは、牽引による車両の牽引の先駆者でした。[ 16 ]
コントロール
HAWP航空機は制御する必要がある。構築されたシステムにおけるソリューションは、様々な制御機構を備えている。システムには、受動的なもの、能動的なもの、あるいはその両方であるものがある。凧型操縦装置(KSU)が持ち上げられると、KSUはロボットのように自己完結型になる場合もあれば、地上から無線操縦によって人間の操縦者によって、あるいはスマートなコンピュータプログラムによって操作される場合もある。一部のシステムでは、機体内部にセンサーが組み込まれており、位置や他の部品との相対位置などのパラメータを報告する。凧型操縦装置(KCU)は操縦以上の機能を持つ。テザーの巻き取り速度と方向は、発電段階または非発電段階におけるテザー張力やシステムのニーズに応じて調整することができる。凧型操縦装置の部品は多岐にわたる。[ 17 ] [ 18 ]
エネルギーを変換する方法
装置の機械的エネルギーは、熱、音、電気、光、張力、押す力、引く力、レーザー、マイクロ波、化学変化、またはガスの圧縮に変換されます。牽引は、貨物船やカイトボーダーを牽引するなど、機械的エネルギーの大きな直接利用例です。風の運動エネルギーから機械的エネルギーを得る方法はいくつかあります。空気より軽い(LTA)係留気球は、タービンの揚力として使用されます。空気より重い(HTA)係留翼は、揚力またはタービン自体として使用されています。LTAとHTAの装置を1つのシステムに組み合わせたシステムが構築され、HAWP(高出力風力発電)を捕捉するために飛行させられています。高高度の風の運動エネルギーを捕捉する自由飛行空中装置のファミリーさえも文献に示されています (1967 年に Richard Miller が著書Without Visible Means of Supportで説明したものに始まります)。また、滑空グライダー競技者であり発明家でもある Dale C. Kramerによる同時期の特許出願もあります。


空中風力タービンの技術革新に関する調査によると、最も一般的な「カイト型AWT」技術は、将来的に大きな成長が見込まれており、2008年から2012年にかけて、空中風力エネルギー全体の約44%を占めました。カイト型AWTは、マルチテザーカイト、カイト兼用円形ファン、回転翼カイトなどのカイトを用いて、高高度に吊り下げられた風力タービンからエネルギーを抽出します。[ 19 ]
HAWPシステムにおける発電機の位置
発電は機械的エネルギーを捕捉する選択肢の 1 つに過ぎませんが、商業および公共事業に大量のエネルギーを供給しようとする専門家は、このオプションに最も注目しています。二次的な選択肢としては、水車の牽引、水の汲み上げ、空気または水素の圧縮などがあります。発電機の位置は、システム間で区別する特徴です。発電機を空中に飛ばす方法は様々です。発電機を係留区域に保つことも、設計上の大きな選択肢です。あるシステムでは、発電機を空中と地上ステーションに配置するオプションが使用されており、小型の発電機で空中の電子機器を稼働させ、地上の発電機は大きな負荷に電力を供給する大きな作業員として機能します。
カルーセルジェネレータ
「カルーセル」構成では、複数の凧が一定の高度で飛行し、高い高度で回転しながら、幅広の円形レール上を移動する発電機を牽引します。大型のカルーセルシステムでは、得られる電力はGWオーダーと計算でき、直径の5乗の関数として得られる電力と、発電機のコスト増加が直線的に関係するという法則が成立します。[ 20 ]
エアロスタットベースのHAWP
稼働中のHAWPシステムを空中に維持する方法の一つは、発電機を持ち上げるか地上に置いたかに関わらず、浮力のあるエアロスタットを使用することです。エアロスタットは通常、カイト揚力効果を実現するように形作られていますが、必ずしもそうとは限りません。漏れた揚力ガスを補充するには、様々な方法があります。生産的な風の場合、エアロスタットは通常、広く避けられないレイノルズ面によって空気抵抗によって吹き飛ばされるため、事実上HAWPのカテゴリーから除外されます。
- WR Benoit米国特許 4350897空気より軽い風力エネルギー変換システム、William R. Benoit 著、1980 年 10 月 24 日出願、1982 年 9 月 21 日発行。
- TWINDシステム(国際特許出願PCT/W02010/015720)は、エネルギー伝達にも用いられるケーブルで地上に接続された静圧気球の上昇力によって上昇する帆面を利用するシステムです。高高度の風は帆に水平方向の圧力をかけ、帆が移動すると、このエネルギーが接続ケーブルを介して地上に伝達されます。前進運動の終盤では、帆面が縮小されるため、エネルギーの無駄を抑えながら風上に向かって移動することができます。[ 21 ]
- マグエンエアロスタットは、軸を水平に保持した垂直軸風力タービンで、軸を風に対して横方向に曲げることで、自転中にマグナス効果の揚力が得られます。電気はエンドハブ発電機で発電されます。[ 22 ]
- LTA Windpower PowerShipは、気球と翼の両方から揚力を得ます。中性浮力に近い状態で動作し、ウインチは不要です。翼後縁のプロペラとタービンによって発電されます。このシステムは、無人離着陸が可能なように設計されています。[ 23 ]
- エアバインは、エアロスタットを使用して風力タービンを空中に持ち上げ、導電性のテザーを介して電気を地上の負荷に戻すことを提案しています。[ 24 ]
- ウィリアム・J・ムートン・ジュニアとデビッド・F・トンプソンによる飛行船の動力タービン:彼らのシステムは、タービンをエアロスタットのドーナツの穴に入れるようなもので、ほぼトロイダル状のエアロスタットの中央部分にタービンを統合しました。[ 25 ]
- HAWEシステム[ 26 ]は、ティアゴ・パルダルのアイデアから開発されたものです。このシステムは、凧揚げシステムに似た揚水サイクルで構成されています。発電段階では、回転する円筒(空中プラットフォーム)のマグナス効果により、牽引力が5~10倍に増加します。凧のように、空中プラットフォームによって生み出される牽引力はケーブルを巻き戻し、地上で発電します。回収段階では、空中プラットフォームにマグナス効果を及ぼすことなくケーブルを巻き戻します。
- ウィンド・フィッシャー社は、横風対応のマグナス効果気球[ 27 ]を開発している。この気球は、ヘリウムガスで膨らませた空気より軽い円筒形の翼を地上に設置し、ポンプサイクルで発電する。グルノーブル近郊に拠点を置く同社は現在、翼幅1.7mの空気より重いプロトタイプの試験を行っている。
- 2023年に公開されたオープンソースのコンセプトでは、ヘリウムガスを充填した気球に帆を取り付け、圧力を発生させて水平軸を中心にシステムを回転させるという構想が提案されている。運動エネルギーは、円運動するロープを介して地上の発電機に伝達される。[ 28 ]
非空中システム
概念的には、隣接する二つの山(自然または地形によるもの)または人工の建物や塔(都市または人工)の間に、ケーブルを使って風力タービンを吊り下げることができます。HAWPが谷を挟んで二つの山頂間をケーブルで結ばれる場合、[ 3 ] HAWP装置は空中に浮かぶのではなく、ケーブルシステムによって支えられます。特許ではこれらの方法が開示されていますが、実際にそのようなシステムが使用されている例は知られていません。ケーブルのない橋が風力タービンを地上高く支える基礎となっている場合、[ 29 ]これらは従来のタワー型タービンと同じグループに分類され、空中システムの繋留が基礎となるHAWPの目的からは外れます。
安全性
雷、航空機交通、緊急手順、システム検査、システム部品とそのテザーの視認性マーキング、電気安全、暴走翼手順、過電力制御、適切な係留などにより、HAWP システムの安全環境が形成されます。
新興産業としての課題
現代の活動以前にも、HAWPへの関心が高まった時期が何度かありました。最初の時期は、陸上で馬車を牽引し、大気中の電気や雷を捕らえて人間が利用することに重点が置かれていました。[ 30 ] 2番目の時期は、研究と投資が盛んだった1970年代と1980年代です。石油価格の下落により、HAWPの大規模な設置は行われませんでした。投資収益率(ROI)が重要な指標であり、このROIは現在の開発活動でも焦点となっていますが、背景にはあらゆる種類の風力発電を支援する再生可能で持続可能なエネルギーの動きがあります。しかし、HAWPはROIにおいて従来のタワー型ソリューションと競合する必要があります。ノルウェーのリスタにあるテストセンターでは、研究の独立した検証を行っています。[ 31 ]
HAWPに関する初期の言及
凧揚げの初期の時代から、凧は回転エンジンのようなもので、係留点を中心にテザー部分を回転させ、高風から機械装置に取り込まれたエネルギーによって手や腕を動かすことが実証されています。空中に浮かぶ装置の張力によって、体の一部や物を持ち上げたり引っ張ったりする作業が行われます。空中風力エネルギー(AWE)は数千年前に誕生しました。何が起こったのかを明らかにし、テザー航空機が特殊な作業を行うための潜在的な可能性を開発することが、AWE HAWPで行われていることです。ある作業員にとって「低い」ことが、別の作業員にとっては「高い」ことなのです。
- 1796年、ジョージ・ポコックは牽引モードを使用して車両で陸路を走行しました。
- 1827年、ジョージ・ポコックの著書『空中航法』(凧または浮力帆による空中航行)が出版されました。ポコックは凧を使った陸海空の航行について記述しました。この本はその後数回再版されました。[ 32 ]
- 1833年、ジョン・アドルフス・エッツラーは、少なくとも牽引力に関してはHAWPが開花しつつあることを予見した。[ 33 ]
- 1864年?本書の「凧船」の章では、凧で船を曳航するのに用いられるHAWPの主要な動力学についてよく説明されている。ジョン・ゲイ著『あるいは少年のための仕事』夏巻第18章。[ 15 ]
- 1935年アロイス・ヴァン・グリースは、高高度風力発電の初期の強力な特許権者としての地位を確立。彼はDE 656194 C 特許で発電に使用するさまざまな凧システムを教えました: Durch Drachen getragene Windkraftmaschine zur Nutzbarmachung von Hoehenwinden
- 1943年、スタンレー・ビザックは自由飛行中の位置エネルギーを利用してタービンに影響を与える周囲の風を変換し、発電機を駆動してバッテリーを充電する方法を考案した。[ 34 ]
- 1967年、ソアリング誌の元編集者リチャード・ミラーが『Without Visible Means of Support』という本を出版し、地上に係留されていない凧を自由飛行させて風層の違いを捉え、大陸を横断する実現可能性について説明しました。このようなHAWPはデール・C・クレイマーの同時期の特許出願の対象です。
- 1973年?ヘルマン・オーベルト著『統治者のための入門書』の付録に、オーベルト博物館所蔵のカイト発電所の模型のスケッチと写真が掲載されている。 [ 35 ]
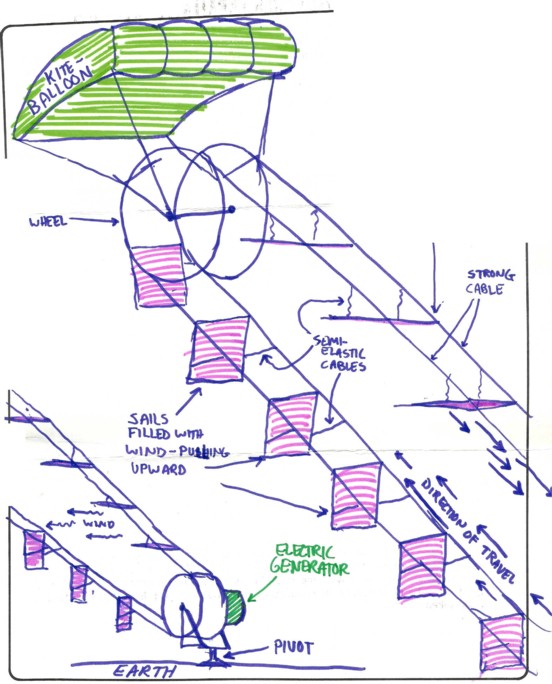
- 1977年4月3日、発明が宣言された。1979年9月21日、ダグラス・セルサムは凧揚げ式無限翼列HAWPシステムを公証した。このシステムは後にオランダ人宇宙飛行士ウッボ・オッケルズ[ 36 ]の1997年の特許に記載されているラダーミルと呼ばれる装置に見られることになる汎用的なシステムである。ダグラス・セルサムは1977年4月3日、自動指向型風力発電浮力式空中トラムウェイを考案した。セルサムが公証した発明開示書には9月20日の日付が記載され、公証人は1979年9月21日に最終署名を行った。メモと図面。[ 37 ]
- 1979年ブライアン・ロバーツ教授がジャイロミル・ジャイロコプター型HAWP風力発電機の開発を開始。[ 38 ]
- 1980年、マイルズ・ロイドは横風凧揚げに関する論文を発表しました。[ 39 ]
- 1986年、ブライアン・ロバーツのAWE HAWPローターは電力を生成し、係留飛行中に自ら浮上した。[ 40 ]
- 1992フリーローターWO/1992020917 フリーローター(JACK、Colin、Humphry、Bruce(一人)作)。Colin Jack、Colin Bruce。マルチローターを扱います。フェアリングテザーを認識します。1992年。
{kind=link}
{kind=link}
オートローテーション
オートローテーションは、AWE技術の大きな分野の基礎となっています。 高高度風力発電の研究開発センターは、ブレードのオートローテーションに頻繁に依存しています。SkyMill Energy、Joby Energy、Sky Windpower、BaseLoad Energy、Magenn Power、Makani Powerは、ブレードのオートローテーションを利用して発電機のシャフトを駆動し、高高度で発電し、導電性テザーを介して地上に送電する空中風力エネルギー変換システム(AWECS)の開発と試験を行っています。[ 41 ]
参照
- 空中風力エネルギー産業協会
- 空中風力タービン
- 高度
- ベッツの法則
- 横風凧揚げ
- カイトアプリケーション
- カイトジェン
- 凧の種類
- ラダーミル
- リニア発電システム
- 空中風力エネルギー組織のリスト
- テザー
- タービン
- 風
- 風力発電所
- 風力
- 風の分布のべき乗則
- 風力資源評価
- 風力タービン
参考文献
- ^ Roberts, Bryan R.; Shepard, David H.; Caldeira, Ken; Cannon, M. Elizabeth; Eccles, Da G.; Grenier, Albert J.; Freidin, Jonathan F. (2007). 「高高度風力発電の利用」. IEEE Transactions on Energy Conversion . 22 (1): 136– 144. Bibcode : 2007ITEnC..22..136R . doi : 10.1109/TEC.2006.889603 . S2CID 1833299 .
- ^燃料なしの飛行 - 再生ソアリング実現可能性調査
- ^ a b架台上の風力タービン
- ^ SkySails 2010年1月5日アーカイブ- Wayback Machine
- ^アンヌ・ケメレ、オーシャンカイトと異常気象
- ^風力発電曲線 2008年12月9日アーカイブウェイバックマシン
- ^デンマーク風力産業協会による「風の力:風速の立方体」Wayback Machineで2009年10月31日にアーカイブ
- ^高高度風力発電の世界的評価
- ^高高度風力資源モデリングと分析、Archan Padmanabhan
- ^ Windswept and Interested 社は、張力回転動力伝達を利用した回転凧セットを通じて事業を展開しています。
- ^ Makani Power, Inc. Archived 2009-12-01 at the Wayback Machineは、発電時に時々電力を供給したり供給しなかったりする、係留式で旋回するタービングライダーのような機体の開発が進んでいると報告した。この報告は、2009年11月にCleanteach Innovation Centerで開催されたHAWP 2009カンファレンスで行われた。
- ^圧電材料
- ^ Joby Energy 2017年4月20日アーカイブ、 Wayback Machine
- ^ KiteShip - テザー飛行の革新 2010年3月5日アーカイブWayback Machine
- ^ a bジョン・ゲイの『少年のための仕事』。全4巻。夏季版には第18章「凧船」が掲載され、HAWP凧揚げの力学について詳細に解説されている。
- ^古典的な凧揚げの仕組み、またはポコック氏がシャルボラントで9m/sの速度を得た方法Archived 2011-08-10 at the Wayback Machine
- ^ SwissKitePower; KCU の設計者は Corey Houle です。
- ^ KiteGen プロジェクト制御は、風力発電機の飛躍的進歩を実現する重要な技術であり、著者は M. Canale、L. Fagiano、M. Milanese、および M. Ippolito です。
- ^ 「空中風力タービン - 技術レポート」。Scope e-Knowledge Center Pvt Ltd. 2013年。 2015年9月24日時点のオリジナルよりアーカイブ。
- ^ 「KiteGen:投資ラウンド、主要顧客、パートナー、投資家 | i3 Connect」 i3connect.com 2018年9月10日閲覧。
- ^ TWIND 2009年12月16日アーカイブ、 Wayback Machine
- ^ Magenn Power, Inc. 2008年12月11日アーカイブ、 Wayback Machine
- ^ LTA風力発電
- ^ファンネル型風力タービン航空機の特許出願 特許出願:公開番号:US 2008/0290665 A1、公開日:2008年11月27日。発明者:カリフォルニア州バーストーのLynn Potter(米国)。
- ^飛行船用動力タービン、米国特許4166596、ウィリアム・J・ムートン・ジュニアとデビッド・F・トンプソン、1978年4月28日出願。
- ^ 「HAWE system Omnidea」。2015年2月26日時点のオリジナルよりアーカイブ。2015年2月26日閲覧。
- ^ 「LinkedInの投稿 by Garrett Smith」 。 2022年11月11日閲覧。
- ^ Michailidis, Giannis (2023-01-09), High-Altitude-Wind-Turbine-Concept、2023年2月22日閲覧
- ^バーレーン世界貿易センターは、地上高くに風力タービンを支える完成した橋の例です。タービンは風に繋がれていないため、これはツインタワーの非繋留、非空中配置の例です。
- ^ポコックの『エアロプレウスティック・アート』は2011年7月23日にWayback Machineにアーカイブされている。
- ^ロアルド、ラムズダル (2017 年 9 月 22 日)。「Vil lokke internasjonale konkurrenter til nytt Norsk testenter for flyvende vindkraft」。テクニスク・ウケブラッド。2017 年9 月 23 日に取得。
- ^ The Aeropleustic Artアーカイブ2006-12-09 at the Wayback Machine
- ^労働なしに、すべての人が手の届く楽園。第1-2巻 ジョン・アドルフス・エッツラー著。「凧を使えば、風力発電を雲の上まで応用できるかもしれない。」
- ^米国特許2368630、1943年6月3日出願。
- ^ 「MEA - 人類の未来」。
- ^高高度の風を利用し、凧の「梯子」をエネルギー源として利用Archived 2006-07-15 at the Wayback Machine
- ^セルサム・イノベーションズ
- ^ BBCニュース、SciTech。
- ^ J. Energy、1980年、第4巻、第3号。
- ^オーストラリアでの実験中、ロバートの回転翼航空機の写真。PJ シェパードは記憶がせいぜい 1986 年だとしている。ブライアン ロバーツは、この写真は 1986 年 5 月のセッションのときだったと回想している。写真では、動力機はほぼ自動回転状態にあり、実際の発電は別のテストで短時間行われた。発電が行われているビデオが公開されている。写真の航空機には 2 つの回転ハブがあり、各ハブから揚力用のローター ブレードと、先端にカウンター バランスのとれた質量を持つ短い流線型のブレードが放射されている。教授は空飛ぶ発電所を計画している。航空機全体の重量は 64 ポンド。左から右の順に、ハッソ ニベ、アラン フィーエン、グレアム レビット、ブライアン ロバーツ。全員シドニー大学の職員。場所: ニュー サウス ウェールズ州マルーランのマウント プレザント ファーム。風速: 約 15 ノット。AWECS の発明者デビッド H. シェパードこれらは、HAWPA 社の Sky WindPower の基盤の一部です。
- ^エナジーカイトシステムズ
参考文献
- ヴァンス、E. 風力発電:大きな期待. Nature 460, 564–566 (2009). https://doi.org/10.1038/460564a
外部リンク
- 空中風力エネルギー参加者リスト
- デルフト工科大学凧揚げ研究グループ 2013年4月3日アーカイブ- Wayback Machine
- エネルギーカイトシステムHAWPシステムに関する用語集とリンク
- AWESystems.info 組織リスト 2019年4月22日アーカイブWayback Machine
- アイルランドの高高度風力資源の実現可能性の評価、Colm O'Gairbhith(Carbon Tracking)
