RLV技術実証プログラム
 RLVプログラムのための技術開発ビークル(TDV) | |
| プログラム概要 | |
|---|---|
| 国 | インド |
| 組織 | インド宇宙研究機関 |
| 番組の歴史 | |
| 間隔 | 2012年~現在[ 1 ] |
| 初飛行 | 2016年5月23日 01:30 UTC [ 2 ] |
| 成功 | 弾道飛行1回、 着陸飛行3回 |
| 発射場 |
|
| 車両情報 | |
| 打ち上げ機 | 改造-GSLV Mark II L40ステージ |
再使用型打ち上げ機技術実証プログラムは、第2段がスペースプレーンである2段軌道投入型(TSTO)再使用型打ち上げ機の実現に向けた第一歩としてISROによって考案された一連の技術実証ミッションである。[ 3 ]
この目的のために、有翼再使用型ロケット技術実証機(RLV-TD)が開発されました。RLV-TDは、動力巡航飛行、極超音速飛行、空気吸入式推進による自律着陸といった様々な技術を評価するための飛行試験台として機能しました。これらの技術を適用することで、打ち上げコストを10分の1に削減することができます。[ 4 ]このプロジェクトは、インドの防衛研究開発機構(DRO)によるアバター宇宙飛行機構想とは一切関係がありません。[ 5 ]
歴史
2006年にインド宇宙研究機関(ISRO)は、入口マッハ数6で約7秒間の安定した超音速燃焼を実証するための一連の地上テストを実施しました。[ 6 ]
2010年3月、ISROは新型探査ロケット「先端技術ロケット(ATV-D01)」の飛行試験を実施した。打ち上げ時の重量は3トン、直径は0.56メートル(1フィート10インチ)、長さは約10メートル(33フィート)であった。[ 7 ]このロケットは、空気吸入式推進技術の実証試験台として、受動型スクラムジェットエンジン燃焼器モジュールを搭載していた。 [ 8 ]
2012年1月、インド宇宙研究機関(ISRO)は、再使用型ロケット技術実証機(RLV-TD)と呼ばれる縮小試作機の製造と試験が承認されたと発表した。[ 9 ] RLV-TD試作機の空力特性評価は、インド国立航空宇宙研究所(National Aerospace Laboratories)によって実施された。RLV-TDは、ハイデラバードに拠点を置く民間企業CIM Technologiesによって、現在、最終段階の建造に入っている。RLV-TDの固定着陸装置は、Timetooth Technologies社から供給された。実物大のRLVでは、引き込み式着陸装置が採用される予定である。[ 10 ]
2015年5月までに、トゥンバ赤道ロケット発射ステーションのヴィクラム・サラバイ宇宙センター(VSSC)の技術者は、大気圏再突入時の高熱からRLV-TDを保護するために、その外面に断熱タイルを設置していた。[ 11 ]この試作機の重量は約1.5トンで、使い捨て固体ブースターHS9の上に搭載され、高度65kmまで飛行した[ 11 ] 。 [ 12 ] [ 13 ]
2016年8月28日、インド宇宙研究機関(ISRO)は、サティシュ・ダワン宇宙センターから先進技術宇宙船ATV-D02の2回目の開発飛行を行い、スクラムジェットエンジンの試験に成功した。 [ 14 ] [ 15 ]スクラムジェットエンジンは、開発の後の段階でRLVに統合される予定である。[ 16 ]
2024年2月、インド工科大学カンプール校は、航空宇宙工学科の極超音速実験空気力学研究所(HEAL)内に、S2と呼ばれる超高速膨張トンネル試験施設を建設し、評価を行いました。S2施設では、スクラムジェットの飛行や大気圏突入などの極超音速状態を再現できます。この施設は、RLV技術実証プログラムを支援することが期待されています。[ 17 ]
プシュパク(RLV-TD)
_before_launch_03.jpg/1280px-RLV-TD_HEX01_at_First_Launch_Pad_of_Satish_Dhawan_Space_Centre,_Sriharikota_(SDSC_SHAR)_before_launch_03.jpg)
プシュパク(サンスクリット語、ISO:Puṣpaka、直訳すると「小さな花」、同名の:Pushpaka Vimana)[ 18 ] ( RLV-TDまたは再使用型打ち上げロケット技術実証機とも呼ばれる)は、2012年に開始されたISROのRLV技術実証プログラムのために開発されたインド初の無人飛行テストベッドである。これは、最終的な2段軌道投入(TSTO)再使用型打ち上げロケットの縮小版プロトタイプである。
2012年1月、ISROの再使用型打ち上げ機の設計が国家審査委員会によって承認され、製造許可が与えられた。この機体は「再使用型打ち上げ機技術実証機」(RLV-TD)と命名された。[ 19 ] ISROは、低軌道へのペイロードの打ち上げコストを、現在の1kgあたり2万ドルから4,000ドルへと80%削減することを目指している。 [ 20 ] [ 21 ] [ 22 ]
RLV-TD は、極超音速飛行、自動着陸、動力巡航飛行、空気吸入エンジン推進による極超音速飛行、極超音速実験 など、さまざまな側面をテストすることを目的として開発されました。
ISROは4回のRLV-TD試験飛行を計画している。[ 19 ] [ 23 ] [ 24 ]
- HEX(極超音速飛行実験) -完了
- LEX(着陸実験) -完了
- REX(帰還飛行実験)、後にOREX(軌道帰還飛行実験)に改名 -計画中
- SPEX(スクラムジェット推進実験) -計画中
ヴィクラム・サラバイ宇宙センター、国立航空宇宙研究所、インド科学研究所の750人のエンジニアからなるチームが、RLV-TDと関連ロケットの設計開発に取り組んだ。RLV-TDは、120時間の風洞実験、5,000時間の数値流体力学、1,100回の飛行シミュレーション試験を経た。RLV-TDの質量は1.75トン、翼幅は3.6メートル、全長は6.5メートル(ロケットを除く)。この車両の降着装置には600枚の耐熱タイルが使用され、デルタ翼と角度のついた尾翼が特徴である。[ 25 ] [ 26 ]プロジェクトの総費用は9億5,000万ルピー( 2023年時点で13億7,000万ルピー、1,620万米ドルに相当)であった。[ 27 ] [ 28 ]今後の開発計画には、飛行中に液化酸素の代わりに大気中の酸素を利用することを目的とした空気吸入推進システムのテストが含まれています。[ 29 ]空気力学的特性の研究は、国立航空宇宙研究所の1.2m三音速風洞施設で実施されました。 [ 30 ]
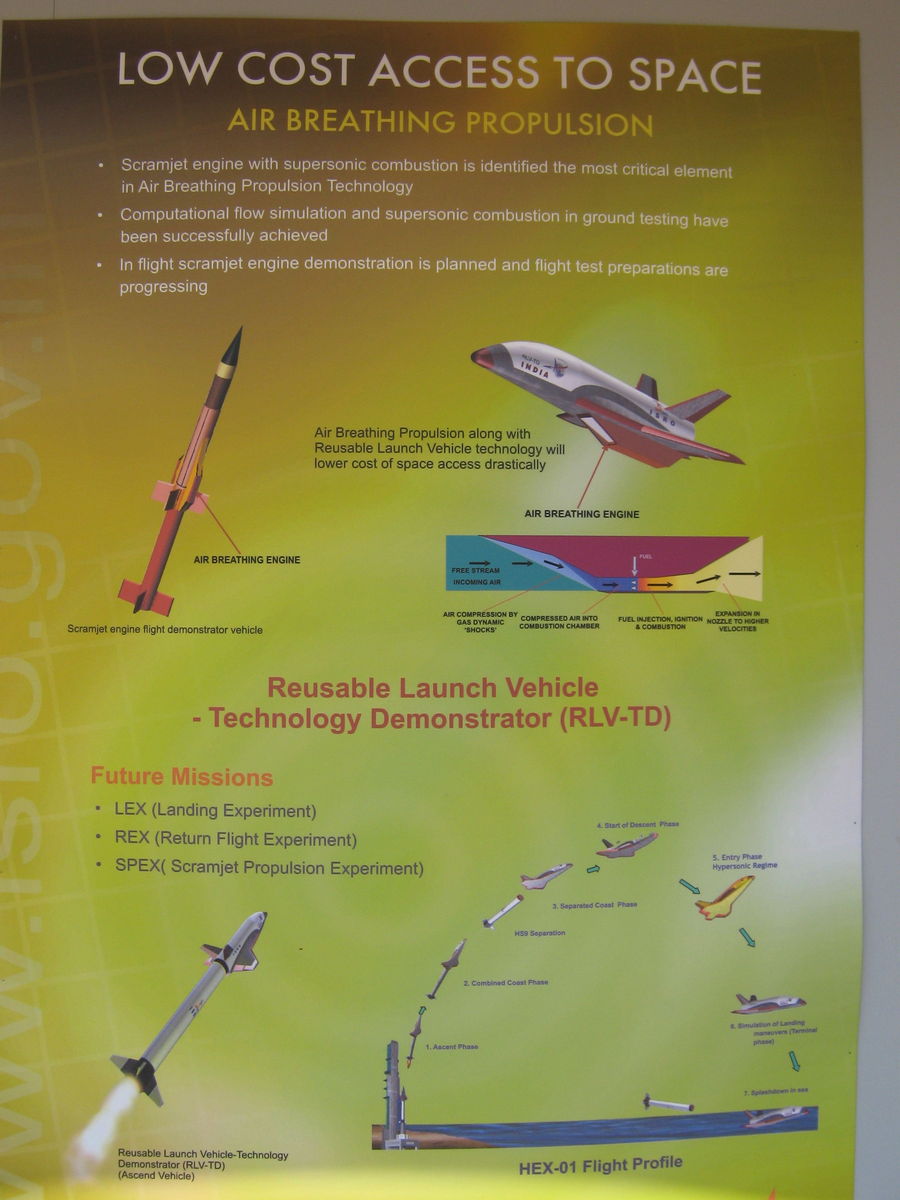
空気呼吸推進プロジェクト
2006年1月、インド宇宙研究機関(ISRO)は、ティルヴァナンタプラムのヴィクラム・サラバイ宇宙センターにおいて、スクラムジェット(超音速ラムジェット)の設計、開発、試験を完了しました。地上試験では、吸気マッハ数6での安定した超音速燃焼が7秒間実証されました。
2010年3月3日、インド宇宙研究機関(ISRO)は、スリハリコタのサティシュ・ダワン宇宙センターから新型探査ロケットATV-D01の飛行試験に成功しました。ATV-D01は打ち上げ時の重量が3トンで、当時ISROが開発した探査ロケットの中で最も重いものでした。パッシブスクラムジェットエンジンを搭載していました。ロケットは7秒間飛行し、マッハ数6+0.5、動圧80+35kPaを達成しました。[ 31 ] [ 32 ]
2016年8月28日、ISROは5分間の飛行でスクラムジェットエンジンをテストした。高度20キロメートルで、先端技術車両に取り付けられたスクラムジェットエンジンに点火した。5秒間燃料を燃焼させ、空気呼吸推進プロジェクトによるデュアルモードラムジェット(DMR)開発の重要なマイルストーンとなった。 [ 33 ]スクラムジェットエンジンの打ち上げ時の重量は3,277kgだった。実証に成功した重要な技術には、燃料噴射システム、空気取り入れ口のメカニズム、超音速での空気呼吸エンジンの点火、超音速での炎の保持などがある。飛行操作のあらゆる側面は、事前にプログラムされたシーケンスに従った。極超音速エンジンの空気取り入れ口、超音速燃焼器の設計と開発、非常に高い温度に耐えられる材料、極超音速流をシミュレートする計算ツール、適切な熱管理、エンジンの地上テストは、ISROが首尾よく克服した技術的課題のほんの一部に過ぎない。[ 34 ] [ 35 ]
2024年7月23日、インド宇宙研究機関(ISRO)は、空気呼吸推進技術の2回目の実験飛行実証を事実上完了させた。実験に使用されたロヒニRH-560探査ロケットの両側に、空気呼吸推進システムが対称的に配置された。空気呼吸推進システムは正常に点火され、試験は満足のいく結果を得た。飛行中は、推進システムの性能を評価するため、110項目のパラメータが徹底的に監視された。[ 36 ]
RLV TD実験
極超音速飛行実験
再使用型打ち上げロケット極超音速飛行実験(RLV HEX)は、RLV技術実証プログラムにおける最初のテスト飛行であった。HEXは2016年5月23日に無事に実施された。[ 2 ] [ 37 ] [ 38 ] RLV-TDは、胴体、ノーズキャップ、ダブルデルタ翼、ツイン垂直ラダーで構成される。エレボンとラダーと呼ばれる能動的な操縦翼面を持つ。[ 38 ]ツインラダーを除けば、形状と操作性は小型のスペースシャトルオービターに似ている。TDVは約600枚の耐熱シリカタイルとフレキシブル外部断熱材を使用し、ノーズキャップはSiCコーティングを施したカーボン-カーボン複合材で作られている。ツインラダーの前縁はインコネル718、主翼前縁は15CDV6である。[ 39 ] [ 40 ] [ 41 ] [ 42 ] [ 43 ] [ 44 ]
HEXはインドが開発した再使用型打ち上げロケットの最初の試験飛行であった。試験飛行の目的は以下の通りであった。[ 45 ]
機体は飛行中、スリハリコタの地上局と艦上ターミナルから追跡された。打ち上げから着水までの総飛行時間は約773.6秒であった。[ 46 ]機体は回収される予定はなかった。[ 47 ] [ 48 ] ISROは「近い将来」、スリハリコタ島 に4kmを超える滑走路を建設する計画である。この飛行では、自律航法、誘導制御、再利用可能な耐熱システム、降下ミッションマネジメントといった重要な技術が検証された。[ 49 ]
着陸実験
再使用型ロケット着陸実験(RLV-LEX)は、極超音速飛行実験に続くRLV技術実証プログラムにおける2回目の試験飛行でした。この実証試験は、2段軌道投入(TSTO)完全再使用型ロケットの開発への道を開くものです。さらに、RLV-LEXと同様の試験をさらに実施し、風、様々な故障条件、その他の要因など、他の条件を試験して、ロケットの試験を最終決定する予定です。[ 50 ]このような試験は2023年4月から2024年6月の間に3回実施されました。ドローグシュートを使用して速度を時速100キロメートルまで減速し、前輪ブレーキを使用して停止させました。[ 51 ]
RLV-LEX-01
RLV-LEXは2023年4月2日にチトラドゥルガ航空試験場で成功裏に実施された。[ 52 ]飛行は午前7時10分に離陸し、高度4.6kmで空中放出された。機体は午前7時40分頃に着陸した。
試験飛行の目的には以下が含まれていた。[ 53 ]
- 宇宙再突入機の着陸の正確な条件をシミュレート - 同じ帰還経路からの高速、無人、自律、正確な着陸
- 軌道再突入宇宙船が帰還経路で経験する可能性のある、地上相対速度、着陸装置の沈下率、正確な機体速度などの着陸パラメータを検証する
ミッションの成功後、ISROのS・ソマナス議長は報道陣に対し、様々な条件下でのソフトウェアとハードウェアの準備状況を確認するため、今後同様の着陸試験をさらに実施する計画だと述べた。報道されている試験では、高度約4.5キロメートルから機体を落下させ、その後、機体が自動で着陸誘導を行う必要がある。[ 54 ]この試験は遡及的にRLV-LEX-01と呼ばれる。
RLV-LEX-02
2024年3月22日にはチトラドゥルガ航空試験場で別の着陸実験が行われた。[ 55 ]実験のより困難な操縦と分散のため、機体は滑走路に自律着陸する前にクロスレンジとダウンレンジの両方の偏差を修正する必要があった。[ 56 ]機体は必要なクロスレンジの修正を行った後、滑走路上で正確に停止するために、ノーズホイール操舵システム、着陸装置ブレーキ、およびドラッグパラシュートを使用した。RLV-LEX-02はRLV-LEX-01と同じ飛行実証機を使用した。液体推進システムセンター(LPSC)、ISRO慣性システムユニット(IISU)、ヴィクラム・サラバイ宇宙センター、およびインド空軍は、航空開発機関(ADE)、空中配送研究開発機関(ADRDE)、およびその他の機関と協力してミッションを完了した。[ 57 ] [ 58 ]
RLV-LEX-03
ISROは、3回目で最後のRLV着陸実験であるRLV-LEX-03の準備を完了した。2024年6月7日のミッション準備レビュー会議で、ヴィクラム・サラバイ宇宙センター所長のS・ウニクリシュナン・ネール氏は、気象条件次第ではあるが、6月前半にチトラドゥルガ航空試験場で実施するミッションを認定した。高度は同じだが滑走路からの横方向の距離が150メートルだったLEX-02とは対照的に、プシュパクはLEX-03でIAFのチヌークヘリコプターで高度4.5キロメートル、滑走路の片側500メートルまで飛行してから放出される。LEX-03ミッションの目標は、衝撃重量を軽減するために、沈下率、つまり降下率を下げる方法を調査することである。プシュパクにはリアルタイム・キネマティクス(RTK)パッケージが搭載される。このテストでは、追い風のシナリオでプシュパックがどの程度の性能を発揮するかも判定されます。[ 59 ]
悪天候のため、試験日は6月の第2週末に変更された。[ 60 ]試験は6月23日にチトラドゥルガ航空試験場で成功裏に実施された。プシュパクはインド空軍のチヌークヘリコプターから高度4.5kmで放出された。[ 61 ]
プシュパックはLEX-03ミッション中、自動的にクロスレンジ修正機動を実施し、滑走路に進入し、滑走路中心線に正確に水平着陸した。着陸後、機体のブレーキングパラシュートを使用して時速約100キロメートルまで減速し、その後、着陸装置のブレーキを使用して機体を滑走路上で停止させ、減速させた。プシュパックは、この地上走行フェーズにおいて、機首車輪とラダー操舵システムを使用して、滑走路に沿って安定かつ正確な地上走行を自動的に維持した。[ 62 ]
このミッションでは、宇宙から帰還する機体の高速着陸条件と進入・着陸インターフェースを再現した。次期軌道帰還飛行実験に必要な、横方向および縦方向の平面誤差補正に対応した高度な誘導システムの検証も行われた。試験機には、擬似衛星システム、慣性センサー、レーダー高度計、フラッシュエアデータシステム、NavIC受信機などのマルチセンサー融合装置が搭載されていた。RLV-LEX-03は、LEX-02の翼付き機体と飛行システムを一切改造せずに再利用することで、飛行システムの堅牢性と複数のミッションへの適応性を実証した。[ 62 ]
未来
ISROは、さらに2つの実験、OREX(軌道帰還飛行実験)とSPEX(スクラムジェット推進実験)を計画している。[ 11 ] [ 63 ] [ 64 ] OREXは、GSLVロケットで打ち上げられ、 CUS上段の代わりにPS-4段(通常のGSLV打ち上げとは異なり、弾道飛行に必要な性能が低いため)と軌道再突入体(ORV)のオジーブペイロードフェアリングの代わりに軌道再突入体(ORV)が使用され、地球の大気圏に再突入して着陸し、プロジェクトの実現可能性を実証する。OREXの機体は着陸実験のPushpakプラットフォームの1.6倍の大きさになる。地球の大気圏への安全な再突入のために、引き込み式の着陸装置と熱保護システムを備える。[ 59 ]
ギャラリー

_before_launch_01.jpg/1280px-RLV-TD_HEX01_at_First_Launch_Pad_of_Satish_Dhawan_Space_Centre,_Sriharikota_(SDSC_SHAR)_before_launch_01.jpg)
_02.jpg/1280px-Launch_of_RLV-TD_HEX01_from_First_Launch_Pad_of_Satish_Dhawan_Space_Centre,_Sriharikota_(SDSC_SHAR)_02.jpg)
_at_Aeronautical_Test_Range_(ATR)_Chitradurga_01.jpg/1280px-Reusable_Launch_Vehicle_Landing_Experiment_(RLV-LEX)_at_Aeronautical_Test_Range_(ATR)_Chitradurga_01.jpg)


{kind=link}
_before_launch_03.jpg){kind=link}
{kind=link}
_before_launch_01.jpg){kind=link}
_02.jpg){kind=link}
_at_Aeronautical_Test_Range_(ATR)_Chitradurga_01.jpg){kind=link}
{kind=link}
{kind=link}
参照
参考文献
- ^ 「ISRO、再使用可能ロケット試験機の飛行を開始」。
- ^ a b「インド初の国産スペースシャトルRLV-TDの打ち上げに成功」。2016年5月23日時点のオリジナルよりアーカイブ。 2016年5月23日閲覧。
- ^ 「インド宇宙研究機関、再利用可能なRLV宇宙船を試験へ」 SpaceFlight Insider 2015年6月2日。2020年11月8日時点のオリジナルよりアーカイブ。 2015年6月8日閲覧。
- ^ 「12月22日火曜日、ISROは独自の再使用型ロケット[再使用型打ち上げ機(RLV)]プログラムの開発に向けて小さな一歩を踏み出した」 LIVE MINT、インディアナ州。2015年。 2016年5月26日時点のオリジナルよりアーカイブ。 2015年12月23日閲覧。
- ^ 「インド政府宇宙局」(PDF) 2012年3月14日。オリジナル(PDF)から2016年8月5日時点のアーカイブ。 2016年4月27日閲覧。
「AVATAR」プロジェクトの実現可能性調査は、DRDOの科学者グループによって実施されました。ISROはこのプロジェクトとは一切関係ありません。
- ^ “Welcome to Vikram Sarabhai Space Centre - ISRO_Supersonic Combustion Tech” . 2016年3月4日時点のオリジナルよりアーカイブ。2015年12月23日閲覧。
- ^ "「宇宙輸送システム:未来に何が待ち受けているのか」B・N・スレシュ博士著。2007年11月2日。2020年8月1日時点のオリジナルよりアーカイブ。 2015年12月23日閲覧。
- ^ 「先進的探査ロケットの飛行試験に成功 - ISRO」www.isro.gov.in。2016年9月9日時点のオリジナルよりアーカイブ。2015年12月6日閲覧。
- ^ 「ISROの再使用型打ち上げロケットの設計が承認」。2020年8月1日時点のオリジナルよりアーカイブ。2015年12月25日閲覧。
- ^ 「RLV再突入ミッション、最終段PSLVにGSLVを使用、着陸装置変更など」タイムズ・オブ・インディア、 2024年6月26日。ISSN 0971-8257 。 2024年6月27日閲覧。
- ^ a b c “Navigation satellite system by March” . 2020年11月8日時点のオリジナルよりアーカイブ。2015年12月24日閲覧。
- ^ 「打ち上げロケットのモデリングと制御」(PDF)www.sc.iitb.ac.in . 2015年12月24日時点のオリジナルよりアーカイブ(PDF) 。 2015年12月6日閲覧。
- ^ 「再利用可能打ち上げ機」 Brahmand.com 、 2010年11月25日。 2014年11月1日時点のオリジナルよりアーカイブ。 2014年10月22日閲覧。
- ^ 「ISROのスクラムジェットエンジン技術実証機の飛行試験に成功」。2016年9月14日時点のオリジナルよりアーカイブ。2016年8月28日閲覧。
- ^ 「インドのロケットはまもなく大気中の酸素を燃料として使用する予定」。
- ^ 「ISRO 、スクラムジェットエンジンの試験開始へ」 The Hindu、2015年11月28日。ISSN 0971-751X。2020年11月8日時点のオリジナルよりアーカイブ。2015年12月6日閲覧。
- ^ Tripathi, Sibu Kumar (2024年2月5日). 「IITカンプールの超高速施設:インドの高速鉄道の夢をどう推進するか」 . India Today . 2024年11月30日閲覧。
- ^ 「インドの再利用可能打ち上げ機はプシュパクと命名へ、首相が進捗状況を評価」 India Today、2024年2月27日。 2024年3月15日閲覧。
- ^ a b「打ち上げロケットが承認」 DNA India . 2016年9月11日時点のオリジナルよりアーカイブ。 2016年5月23日閲覧。
- ^ 「Make In India、スワデシ・スペースシャトルの打ち上げ成功で翼を広げる」。フリープレス・ジャーナル。2016年5月25日時点のオリジナルよりアーカイブ。 2016年5月24日閲覧。
- ^ 「インド、ミニスペースシャトルを打ち上げた」 sciencealert.com。2016年9月17日時点のオリジナルよりアーカイブ。 2016年5月24日閲覧。
- ^ 「超音速燃焼技術のブレークスルー」。ヴィクラム・サラバイ宇宙センターウェブサイト。2016年3月4日時点のオリジナルよりアーカイブ。 2016年5月23日閲覧。
- ^ 「デモンストレーションプログラム」 ISROウェブサイト。2016年5月23日時点のオリジナルよりアーカイブ。2016年5月23日閲覧。
- ^ 「Low cost access」 . bharat-rakshak.com. 2016年3月3日時点のオリジナルよりアーカイブ。 2016年5月23日閲覧。
- ^ 「インド、有翼宇宙飛行機を実験的弾道発射に成功」 spaceflightnow.com. 2016年8月30日時点のオリジナルよりアーカイブ。 2016年5月24日閲覧。
- ^ 「ISROの再使用型ロケット:何が起こり、次に何が起こったのか」 thewire.in。2016年5月25日時点のオリジナルよりアーカイブ。2016年5月24日閲覧。
- ^ 「VSSC、新たな空を発見」。The Indian Express。2016年9月15日時点のオリジナルよりアーカイブ。2016年5月24日閲覧。
- ^ 「インド独自のスペースシャトルの打ち上げに成功」ヒンドゥスタン・タイムズ。2016年8月30日時点のオリジナルよりアーカイブ。 2016年5月24日閲覧。
- ^ 「ISRO、大気圏から直接酸素を燃料として利用するロケットを試験へ」 2016年5月26日。2016年9月8日時点のオリジナルよりアーカイブ。2016年7月7日閲覧。
- ^ 「ベンガルール:国立航空宇宙研究所の1.2m三音速風洞、55年間の運用を完了」 ANI 、 2022年6月6日。 2024年11月22日閲覧。
- ^ 「先進的探査ロケットの飛行試験」 ISROウェブサイト。2016年9月9日時点のオリジナルよりアーカイブ。2016年5月23日閲覧。
- ^ 「ISRO、スワデシ宇宙飛行機の開発に向けて前進」 Khul Ke . 2023年9月7日時点のオリジナルよりアーカイブ。 2023年9月7日閲覧。
- ^ TS, Subramanian (2016年9月28日). 「スクラムジェットの成功」 .フロントライン. 2024年7月24日閲覧。
- ^ 「ISRO 、大気中の酸素を利用したスクラムジェットエンジンの試験に成功」 The Times of India、2016年8月28日。ISSN 0971-8257 。 2024年7月23日閲覧。
- ^ 「ISROのスクラムジェットエンジン技術実証機、飛行試験に成功」 ISRO 、宇宙省。 2024年7月23日閲覧。
- ^ 「インド宇宙研究機関、空気呼吸推進技術の2回目の試験に成功」 India Today、2024年7月23日。 2024年7月23日閲覧。
- ^インドの再使用型打ち上げロケット技術実証機(RLV-TD)、飛行試験に成功Archived 2021-02-09 at the Wayback Machine . 2016年5月23日. ISRO.
- ^ a b RLV-TD Archived 2021-04-17 at the Wayback Machine . ISRO. 2016年5月23日. 図を含む。
- ^キラン、クマール (2016 年 4 月 28 日)。」「宇宙計画のための材料の自主開発」. 2020年6月30日時点のオリジナルよりアーカイブ。2020年6月30日閲覧。
- ^ 「RLV-TDの断熱保護としてのシリカタイル」(PDF)。2020年6月30日時点のオリジナルよりアーカイブ。 2020年6月30日閲覧。
- ^ “Current Science Volume 114 - Issue 01” . 2020年6月30日時点のオリジナルよりアーカイブ。 2020年6月30日閲覧。
- ^ 「インドの再利用可能ロケットを支える技術」 2018年11月12日。2020年6月30日時点のオリジナルよりアーカイブ。 2020年6月30日閲覧。
- ^ 「ISROの再使用型ロケット技術の深掘り – パート1」 。 2020年6月28日時点のオリジナルよりアーカイブ。 2020年6月30日閲覧。
- ^ 「ISROの再使用型ロケット技術の深掘り – パートII」。2020年7月3日時点のオリジナルよりアーカイブ。 2020年6月30日閲覧。
- ^ “ An Indian space shuttle takes shape 2009” . The Hindu . 2009年3月31日. 2023年4月4日時点のオリジナルよりアーカイブ。 2023年4月24日閲覧。
- ^ Yadav, Sandeep; Jayakumar, M.; Nizin, Aziya; Kesavabrahmaji, K.; Shyam Mohan, N. (2017年12月1日). 「RLV-TD HEX-01ミッションにおけるTDVの最終段階飛行性能と着陸時間評価」 . Journal of the Institution of Engineers (India): Series C . 98 (6): 679– 688. Bibcode : 2017JIEIC..98..679Y . doi : 10.1007/s40032-017-0403-9 . ISSN 2250-0553 . S2CID 115904439 .
- ^ 「インドの再使用型打ち上げロケット、飛行試験に成功」 ISROウェブサイト。2016年9月14日時点のオリジナルよりアーカイブ。 2016年5月23日閲覧。
- ^ 「ISRO、インド初の国産スペースシャトルの打ち上げに成功」。エコノミック・タイムズ。2016年8月28日時点のオリジナルよりアーカイブ。2016年5月24日閲覧。
- ^ 「ISRO、今年6つの主要ミッションに向けて準備を進める」 Express News Service 、2015年5月30日。 2016年9月10日時点のオリジナルよりアーカイブ。 2015年6月8日閲覧。
- ^ 「チャラケレで来週着陸実験が行われる可能性が高い」タイムズ・オブ・インディア。ISSN 0971-8257 。2024年3月16日閲覧。
- ^ 「ISROの打ち上げロケット宇宙輸送」(PDF) . ISRO . 2025年2月23日閲覧。
- ^ "「ISROの再使用型ロケットの着陸実験が成功」「。
- ^ 「ISRO、再使用型打ち上げロケット自律着陸ミッション(RLV LEX)を成功裏に実施」インド宇宙研究機関isro.gov.in。2023年4月2日。 2023年4月2日時点のオリジナルよりアーカイブ。 2023年4月2日閲覧。
- ^ 「ISROの再使用型ロケットの着陸実験が成功、RLVは軌道再突入ミッションに近づく」。タイムズ・オブ・インディア。2023年4月2日。ISSN 0971-8257。2023年4月2日時点のオリジナルよりアーカイブ。 2023年4月2日閲覧。
- ^ Kumar, Chethan (2024年3月22日). 「ISRO、再使用型打ち上げロケットの2回目の主要着陸実験を完了」 . The Times of India . ISSN 0971-8257 . 2024年3月22日閲覧。
- ^ Bagla, Pallava (2024年3月22日). 「注目:インドの21世紀型プシュパク『ヴィマン』が成功裏に進水」 NDTV.com . 2024年3月22日閲覧。
- ^ 「ISRO、再び成功!再使用型打ち上げロケット『プシュパック』の着陸ミッションがカルナタカ州で成功 – 写真をご覧ください」 Financialexpress 、 2024年3月22日。 2024年3月22日閲覧。
- ^ 「ISROが新たなマイルストーンを達成、プシュパック再使用型打ち上げ機の着陸に成功」 Moneycontrol . 2024年3月22日. 2024年3月22日閲覧。
- ^ a b Rajwi, Tiki (2024年6月8日). 「ISRO、3回目の再使用型ロケット着陸実験に向けて準備万端」 . The Hindu . ISSN 0971-751X . 2024年6月9日閲覧。
- ^ 「低コストの宇宙ミッション向けに作られたISROの再利用可能な打ち上げ機、今週3回目のテスト着陸を予定」 ThePrint . 2024年6月17日. 2024年6月17日閲覧。
- ^ 「インド宇宙研究機関の再使用型ロケット、3回目の着陸試験を完了、軌道再突入への道を開く」タイムズ・オブ・インディア紙 ISSN 0971-8257 . 2024年6月23日閲覧。
- ^ a b「ISRO、3回目にして最後の『プシュパック』再使用型ロケット着陸実験に成功」 The Hindu紙、 2024年6月23日。ISSN 0971-751X 。 2024年6月23日閲覧。
- ^ “RLV-TDのポスター” . 2016年3月3日時点のオリジナルよりアーカイブ。2009年7月30日閲覧。
- ^ 「再使用型打ち上げロケット - 技術実証プログラム(RLV-TD) - ISRO」isro.gov.in。2016年5月23日時点のオリジナルよりアーカイブ。 2015年6月8日閲覧。
{kind=link}
{kind=link}
外部リンク
