AN/MPN
AN/MPNは、第二次世界大戦中に初めて導入された移動式地上管制進入(GCA)レーダー群を指す米軍の接頭辞です。「MPN」は、統合電子型式指定システム(JETDS)における、移動式(M、地上移動システム)、レーダー(P)、航法援助(N)の命名法です。AN/MPNの後にハイフンと数字が続き、そのシステムの開発・製造順序を示します。
変種
{kind=link}
- AN/MPN-1
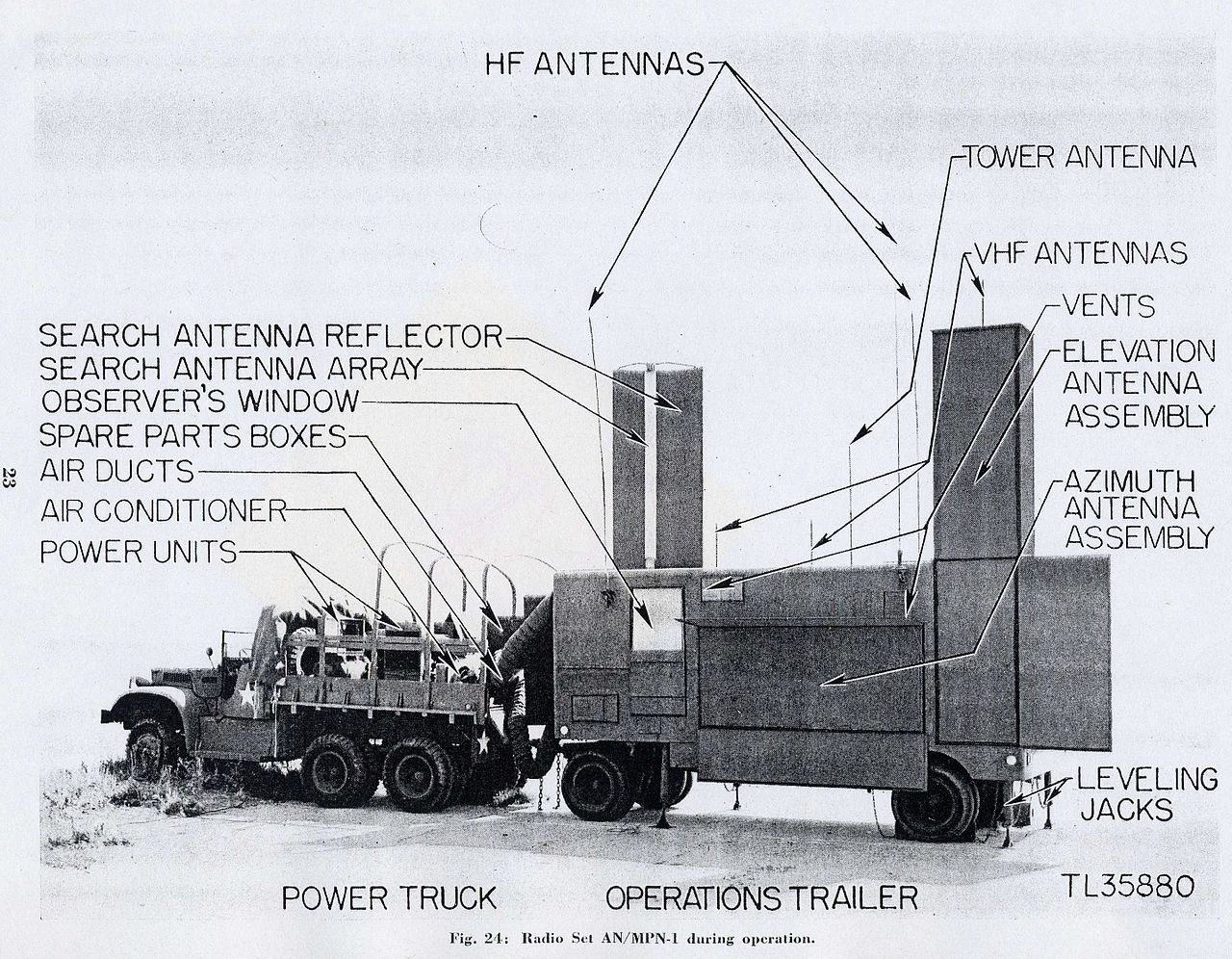
- 1940年代初頭にギルフィラン社によって最初に開発され[ 1 ] 、後にベンディックス・アビエーション社によって[ 2 ]開発されたこのシステム(「無線機」と呼ばれていた)[ 3 ]は、移動式の軍用精密進入レーダー(PAR)と空港監視レーダー(ASR)を組み合わせた地上管制進入(GCA)システムとして運用された。このシステムは、視界ゼロに近い状況下で、飛行場の滑走路への安全な進入のため、航空機を所定のグライドパスに沿って誘導するのを支援した。このシステムは第二次世界大戦中に導入された。[ 2 ]レーダー(PAR/ASR)は、 PARの場合は半径10マイル(8.7 nmi; 16 km)、ASRの場合は半径30マイル(26 nmi; 48 km)以内の航空機の距離、方位、仰角の情報を提供した。 [ 4 ]
- 15kW PARはXバンド周波数範囲で動作し、80kW ASRはSバンド範囲で動作しました。[ 4 ]方位アンテナはビーム幅1° 、仰角2°の高さを持ち、仰角アンテナは幅3.6°、高さ0.6°で、両方のアンテナのスキャン速度は30RPMでした。 [ 4 ]水平方位ビーム幅20°、仰角ビーム7°で、システムの動作上限は4,000フィート(1,200メートル)でした。[ 1 ]
- ダイヤモンドT 4トン 6×6トラック(G-509) が最初の牽引車で、運用機器の大部分を積んだ4輪トレーラーを牽引していました。[ 3 ]また、ダイヤモンドTトラックには2台のPE-127-Aガソリン駆動発電機[ 1 ]が搭載されており、 117ボルト、60ヘルツの電力、エアコン、スペアパーツボックスを提供していました。[ 3 ]高周波(HF) および超高周波(VHF) 通信は、 SCR-274送信機とBC-342受信機によって提供されました。極超短波(UHF) 通信は、後に前線航空管制官が使用するためにジープに搭載された戦術無線を介して追加されました。[ 1 ]
- AN/MPN-2
- MPN-2は、もともとマイスナー・マニュファクチャリング社がアメリカ海軍向けに開発した、航空機の航行支援およびホーミング設備用の移動式無線/レーダービーコントランスポンダであった。主要構成部品であるAN/CPN-6とAN/CPN-8はトレーラーバンに搭載されていた。MPN-2はXバンドで動作し、9.31GHz ( 3.22cm)で40kWの電力で送信し、9.32~9.43GHz(3.22~3.18cm)の信号を受信する。また、Sバンドでは、3.256GHz(9.21cm)で1.1kWの電力で送信し、3.267~3.333GHz(9.18~8.99cm)の信号を受信する。[ 4 ]
- AN/MPN-3
- ベンディックス社が製造したもう一つのGCAシステムで、Sバンドで動作するASRとXバンドで動作するPARを備えている。具体的には、ASRは2.7~2.9GHz(11~10cm)、PARは9.08~9.17GHz(3.30~3.27cm)で動作する。このシステムは、ピーク出力45kWで送信し、射程距離は30マイル(26海里、48km)であった。[ 1 ] [ 5 ] ASRの運用高度上限は4,000フィート(1,200m)であった。[ 4 ]システム全体としては、各チャネルのレーダーセットが冗長化されていない単一のセットであることを除き、MPN-1と類似している。これにより重量が軽減されて機動性が向上し、システムの運用に必要な人員も削減された。 MPN-3もMPN-1と同様に、ダイヤモンドT 4トントラックを牽引車と4輪の機材トレーラーとして使用した[ 5 ] [ 4 ]。
{kind=link}

{kind=link}

- AN/MPN-5
- ベンディックス社が製造した[ 4 ]このSバンドおよびXバンドGCAシステムは、捜索レーダー装置(SRE)と精密進入レーダー(PAR)という2つの異なるレーダーセットを使用していました。350kW( 平均400W )のSREは、2.74~2.9GHz(10.9~10.3cm)のSバンドで動作し、範囲は約58マイル(50海里、93km)でした。そのパルス繰り返し周波数(PRF)は 1.2kHzでパルス幅は0.8µsでした。XバンドPARは9~9.18GHz(3.33~3.27cm)で動作し、わずか35kWというかなり低い電力で、結果として範囲ははるかに短く、12マイル(10海里、19km)でした。PARは、2.4kHzというより高いPRFと、0.25µsという広いパルス幅を持っていました。[ 6 ]
- AN/MPN-8
- AN/MPN-2と同一の装置で、「H」機能が追加され、300~600kHz(1,000~500m)の範囲で400ワットの信号を送信する。 [ 4 ]
- AN/MPN-11
- アメリカ空軍向けにギルフィラン・ブラザーズ社が製造した[ 4 ] MPN-11着陸管制装置もASR/PAR S/XバンドGCAシステムを組み合わせたもので、トレーラー搭載型のASRはAN/CPN-4レーダーの一種であった。 [ 7 ]このシステムには、静止目標からのエコーを除去するための新しい移動目標表示(MTI)モードが組み込まれていた。 [ 4 ] MPN-11とCPN-4のコンポーネントは完全に互換性があり、唯一の違いは一方がボルトで固定されたトレーラーパネルを持ち、もう一方がリベットで固定されたパネルを持っていることである。
- MPN-11には4つの派生型、MPN-11A、-11B、-11C、-11Dがあった。MPN-11Aは通信にHF、AN/ARC-3 VHF、AN/ARC-27 UHF無線を使用し、自己完結型電源を備えていた。-11Bも自己完結型電源と同じくVHFとUHF無線を使用していたが、HFにはAN/ART-13とAN/ARR-15を使用していた。-11Cは外部発電機、7.5トン(7.4ロングトン、8.3ショートトン)のエアコン、配電盤を使用していた。-11Dモデルは自動周波数制御(AFC)を備えた-11Cに似ており、-11Cと完全に互換性があった。[ 4 ]
- ピーク出力600kWのASR送信機は、2.78~2.82GHz(10.8~10.6cm)の周波数帯域で動作し、追跡対象航空機の種類に応じて20~30マイル(17~26海里、32~48km)の射程範囲をカバーしていました。PARは、ピーク出力45kWの信号を9~9.16GHz(3.33~3.27cm)の周波数帯域で送信し、射程範囲は10マイル(8.7海里、16km)でした。
- AN/MPN-13
- ITT-ギルフィラン社が開発したモバイルPARは、 45kWで2.7~2.9GHz(11.10~10.34cm)で動作し、 500kWで9~9.16GHz(3.33~3.27cm)で動作し、範囲はわずか10マイル(16km)です[ 1 ]。
- AN/MPN-14
- 完全なレーダー進入管制(RAPCON) または GCA 設備として構成できる移動式地上進入システムで、航空交通管制官はこれを使用して、参加航空機を識別、順序付け、分離し、防空回廊および防空圏を通じて最終進入誘導を提供し、指定された空港および航空基地の現地防空部隊と ID および意図を調整します。これらのサービスは、あらゆる種類の天候で提供できます。半径 230 マイル (200 nmi、370 km) までの二次レーダーと 69 マイル (60 nmi、111 km) までの一次レーダー カバレッジを使用して航空機を識別します。PAR は、17 マイル (15 nmi、27 km) から着陸までの方位角と仰角の両方の情報を提供します。PAR と ASR は両方とも最終進入支援として使用できます。MPN-14 には、オペレーション シェルターに 3 つの ASR 表示インジケータと 1 つの PAR インジケータがあり、メンテナンス シェルターに ASR と PAR の各インジケータが 1 つずつあります。すべての操作はオペレーション トレーラーから実施されます。このシステムは単一の滑走路に限定されていますが、移動可能なターンテーブルを使用することで、反対方向の滑走路操作を提供する機能を備えています。
- AN/MPN-17
- ITT-ギルフィラン社製のもう一つの移動式着陸管制レーダーは、2.7~2.82GHz(11.1~10.6cm)と3~10GHz(10.0~3.0cm)で動作する[ 1 ]
- AN/MPN-23
- レイセオン社製[ 8 ]のMPN-23は、海軍/海兵隊航空基地(NAS/MCAS)のXバンド固体化 PAR(PAR)AN/FPN-63のトレーラー搭載型である。仰角8°、方位角20°のこの送信機は、ピーク出力80kWで、射程範囲は10~20マイル(8.7~17.4海里、16~32km)である。このシステムは、2.75kHzの固定PRF、または3.3kHzを中心とするスタッガードPRFと0.2µsのパルス幅を使用する。[ 8 ]
{kind=link}

- AN/MPN-25
- ITT社のGCA-2000と呼ばれる市販製品をベースにしたMPN-25は[ 9 ] 、全天候型フェーズドアレイGCAシステムで、同じアンテナを使ってPARと360度ASRエリアをスキャンし、高度測定機能も備えています。初期のAN/MPNシステムとは異なり、MPN-25には独立回転アンテナを使用した二次監視レーダーも含まれています。 [ 10 ] ASR/PARのフェーズドアレイアンテナは、空間でRFビームを形成できるように位相と電力が調整されたガリウムヒ素(GaAs)送受信モジュール(TRM)で構成されています。また、より高速なリアルタイム制御のために光ファイバーリンクも組み込まれています。
- 次に、システムは生のターゲット データを処理してデータ ワードを形成し、Solaris で動作しているコンピュータ ディスプレイにそれを送信します。 ASR 範囲は 35 マイル (30 nmi、56 km)、PAR カバレッジは 23 マイル (20 nmi、37 km) です。 システムは、ASR、PAR、および複合モードの 3 つのモードで動作できます。 ASR モードでは、方位アンテナが 60 RPMで回転し、システムは ASR に典型的なターゲットの処理にのみ使用され、AN/TPX-56敵味方識別(IFF) システムも利用してターゲットを識別します。 生のリターンと IFF の両方がトラッカーで処理されます。 PAR モードでは、方位アンテナは回転せず、典型的な PAR ターゲットを処理するために、方位面と仰角面で滑走路の逆方向の針路上に通常どおり固定されます。 複合モードでは、方位アンテナが 60 RPM で回転し、1 秒ごとのICAO更新レートを PAR ディスプレイに提供します。表示ソフトウェアには、ASR/PARの2つの動作モードがあります。PAR表示はITTソフトウェアを使用し、ASRソフトウェアは複数のレンジで使用されるBDMソフトウェアの派生です。
- AN/MPN-26
- 政府に受け入れられなかったプログラムは2008年に中止されました。初期のレーダーには、空港監視レーダー、GCAレーダー、非精密ASR進入レーダー、または空港表面検出装置として機能するコンパクトでポータブルなシステムであるAN/FPN-36「クアッドレーダー」と、それらの機能を提供するより大型で近代的で精密なシステムであるAN/CPN-4がありました。
参照
リスト
参考文献
- ^ a b c d e f g「MPN – モバイル; レーダー; ナビゲーションエイド」MobileRadar.org . 2025年12月27日閲覧。
- ^ a b Wolff, Christian. 「AN/MPN-1」 . RadarTutorial.eu . 2025年12月27日閲覧。
- ^ a b c Marshall, GC; Ulio, Maj Gen JA (1944年9月20日). TM 11-1543 Radio Set AN/MPN-1 Service Manual (PDF) (Technical Manual). Washington, DC : US War Department . 2025年12月27日閲覧。(801ページ)
- ^ a b c d e f g h i j k TM 11-487C-1 軍事標準化ハンドブック:米国レーダー機器(PDF)(技術マニュアル)。全2巻。ワシントンD.C .:陸軍省。1965年12月15日。 2025年12月27日閲覧。(1,531ページ)
- ^ a b Wolff, Christian. 「AN/MPN-3」 . RadarTutorial.eu . 2025年12月27日閲覧。
- ^ Wolff, Christian. 「AN/MPN-5」 . RadarTutorial.eu . 2025年12月27日閲覧。
- ^ Wolff, Christian. 「AN/MPN-11」 . RadarTutorial.eu . 2025年12月27日閲覧。
- ^ a b Wolff, Christian. 「AN/FPN-63」 . RadarTutorial.eu . 2025年12月27日閲覧。
- ^ Wolff, Christian. 「GCA-2000」 . RadarTutorial.eu . 2025年12月27日閲覧。
- ^ 「Gilfillan Air Traffic Control」(製品パンフレット)。カリフォルニア州ヴァンナイズ:ITT Industries、Gilfillan Div 。 2025年12月27日閲覧。
外部リンク
- ジャクソン、デイビッド(2002年8月21日)「新型レーダーが空の安全を確保」 AF.mil . 2025年12月27日閲覧。
- Googleブックス– ブラインドランディング:アメリカ航空における低視程運用、1918~1958年
- Googleブックス– 技術的および軍事的要請:第二次世界大戦のレーダー史
